モーターモデル
モーターモデル 概要
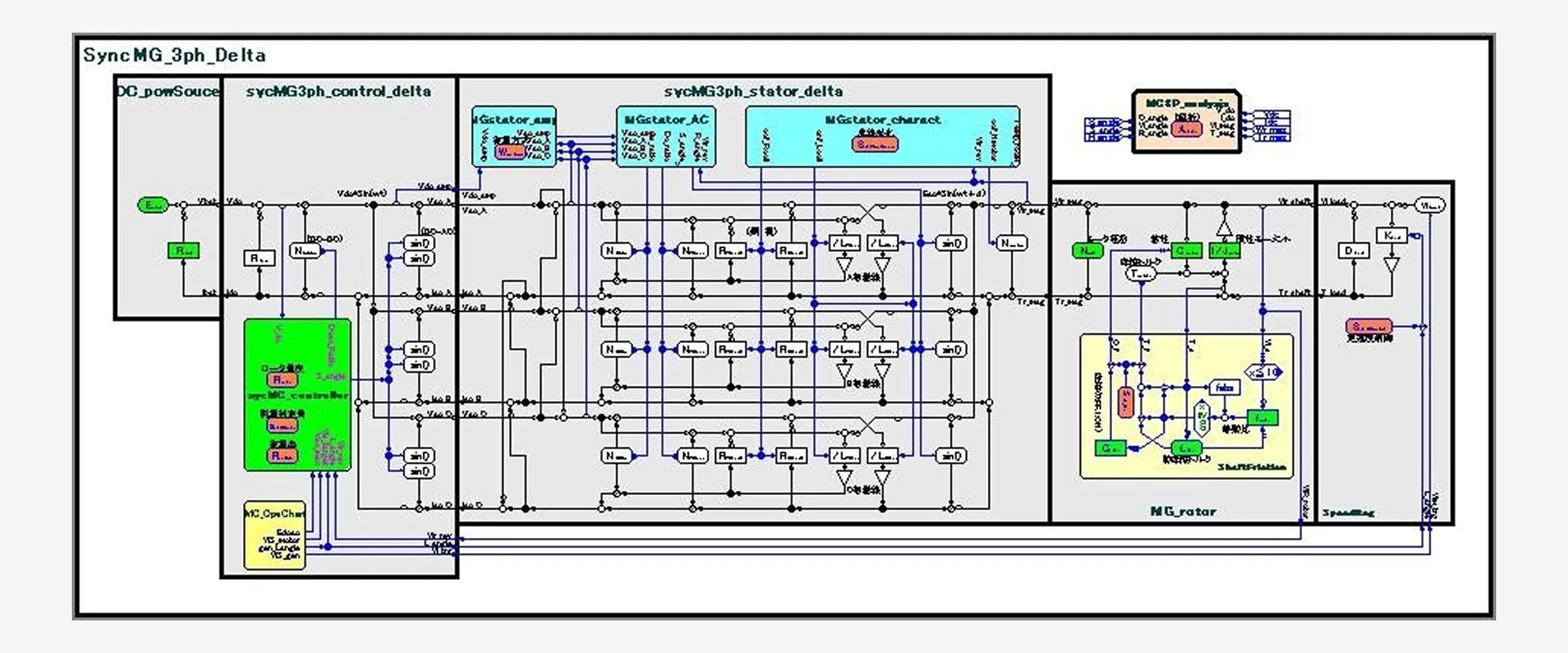
キャテックのモータモデルは、モータの入出力特性を考えるだけでなく、エネルギーバランスが取れたモデル構造で、鉄損(ヒステリシス)や風損、モータ定数、電機子抵抗損(銅損)、摩擦損、入力電圧の脈動などを考慮した、モータ開発・設計用のモデルを作ることが可能です。
下記のような特徴を有しています。
下記のような特徴を有しています。
- 実際のモータ構造から、特性の変化や観測状態量の変化まで確認したいモデルを開発できます。
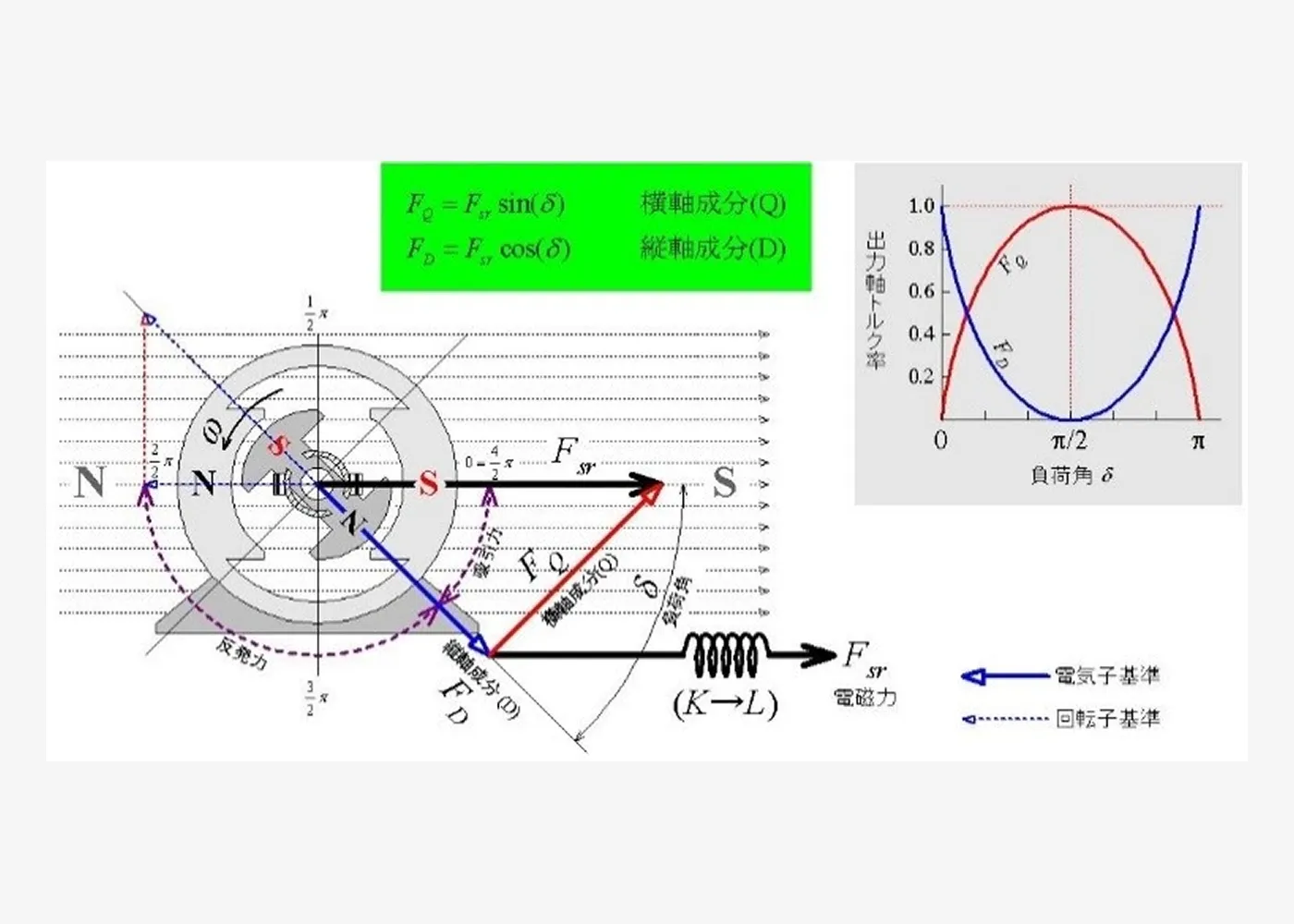
- モータの電流・電圧をdq法で表す元の考え方は、二反作用理論であり、ベクトル計算を含む二反作用手法を用いたシステム設計により、モータ実体に近いモデル構築を行います。
- モータモデルは、電圧の印加による回転出力だけでなく、制動や発電の機能を持つが、それらを再現できるモータモデルを作ることができます。
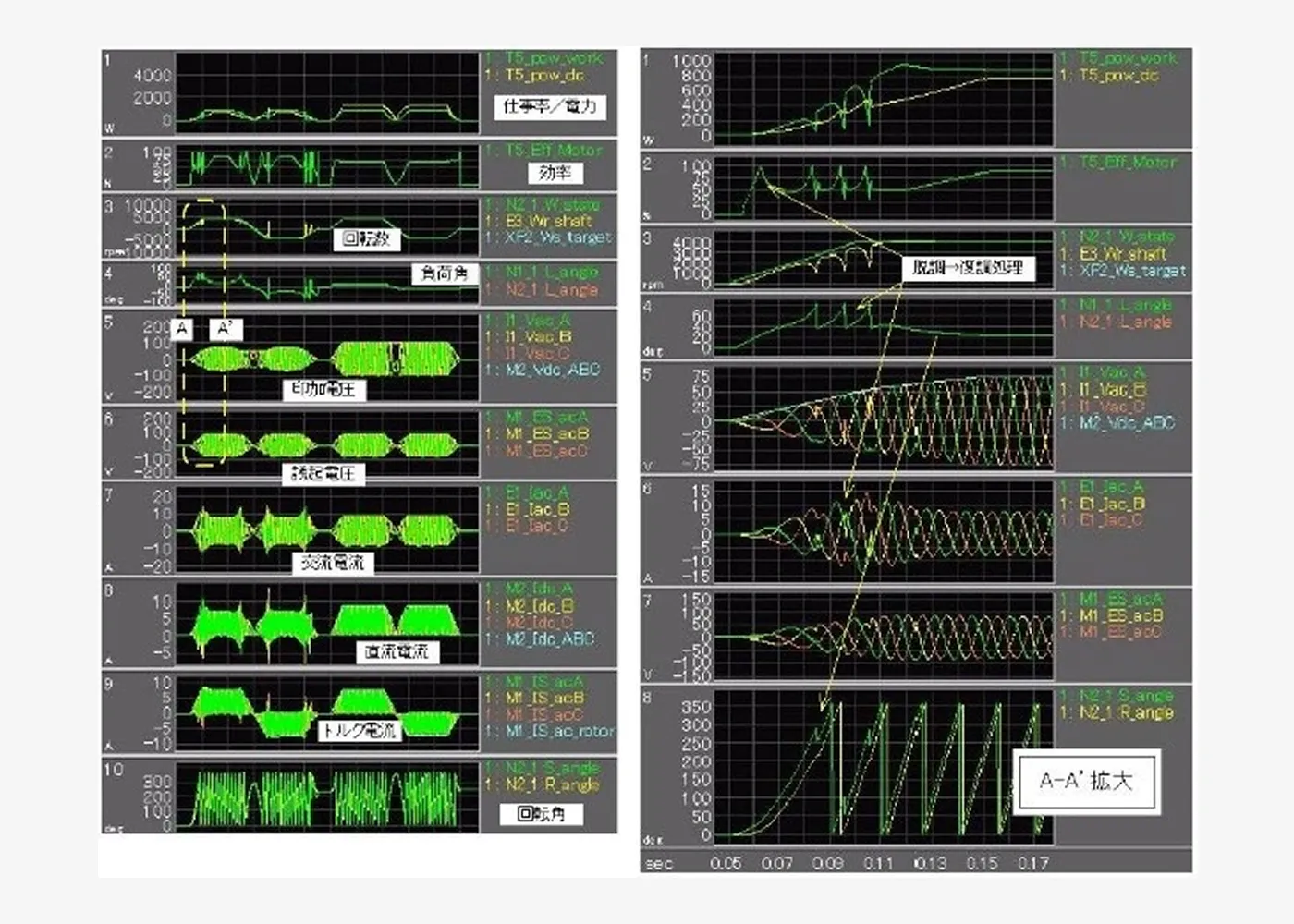
- 実験データの利用による、再現モデルが可能。インピーダンスや損失要素のパラメータの決定や負荷角特性、回転の効率など、モデル内に自由に配置できる観測点により、内部の特性を把握することができます。
- 顧客の保有技術である実体の特長や方式を非線形要素として組み込みできます。その要素は、実験データであっても、非線形の処理プログラムであっても可能です。
- 企画・開発段階で使用するモデルの提案、同じモデル図を、設計、実験部門が共有できます。
モータモデル例
モータモデル例
システム構造