|
|
|
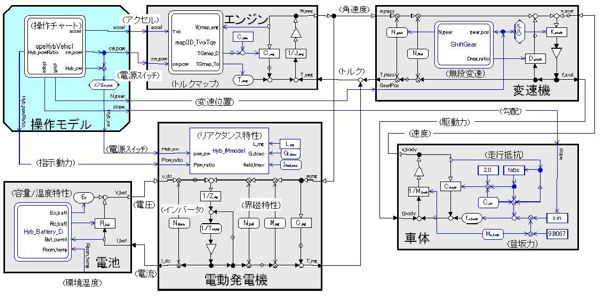
ハイブリッド車モデルの事例
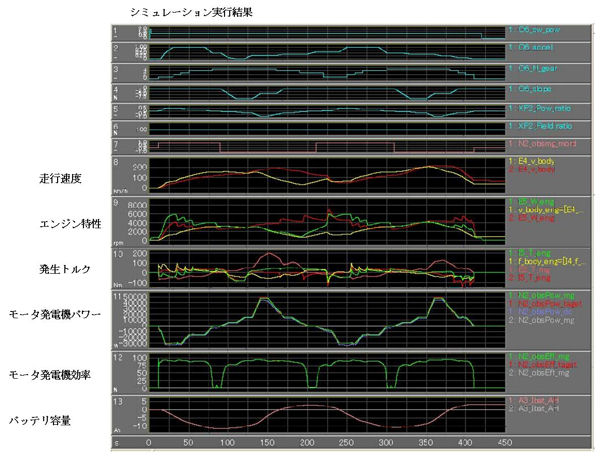
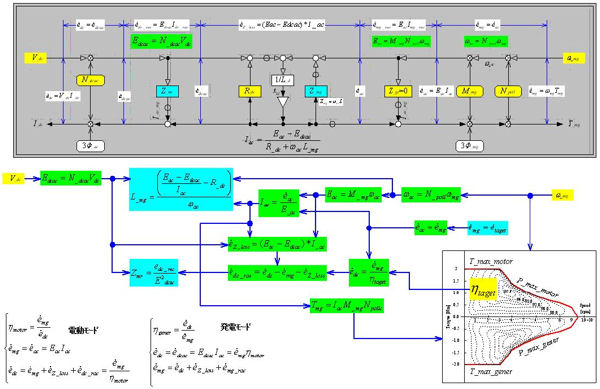
電気系と機械系が複合したシステムの例として、ハイブリッド車の事例を示します。
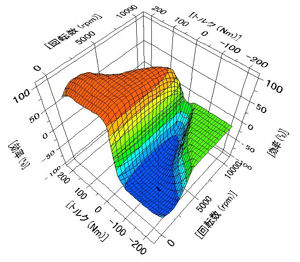
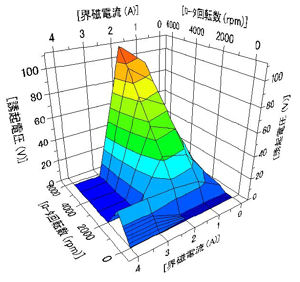
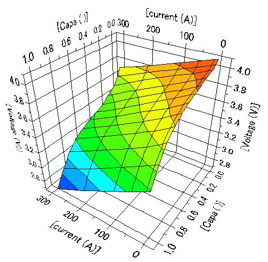
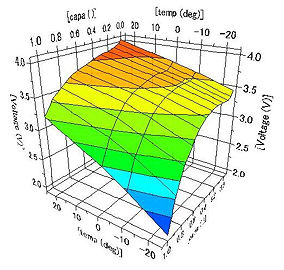
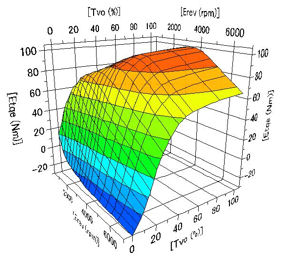
計算事例の解説(黄色のデータから青色パラメータを決定) 精度の良いモータ発電機モデルとするために、予め決まっているパラメータと、計測して得られる入出力データから、モータの効率曲線(右下図)により、効率ηが求まり、各所の電圧値から、インピーダンスZを計算することができる。 (株式会社ダイモスの開発内容を紹介しています)
前のページ << 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 >> 次のページ
|
|
Copyright(c) 2006-2010 CATEC Inc. All Rights Reserved. このホームページに関する一切の著作権はキャテック(株)に帰属します。 |